IoT sensors
IoT sensors – development app for visualisation of sensor data
Features
☂︎ Thingy:91 temperature, pressure, humidity, air resistance, ambient light, accelerometer, impact, LED control
☂︎ compass with 3D calibration, accelerometer, gravity, gyroscope, battery state of charge
☂︎ JSON format for sensor data
☂︎ connectivity: BLE, TCP, UART
☂︎ bridge TCP to BLE or UART requires
g_relay,
gncom
or compatible server,
and allows multiple clients to share a single sensor
☂︎ compatible with
sensor samples
from nano RTOS
☂︎ new sensors can be added on demand
Notes
IoT sensors is a development app for visualisation of sensor data
the sensor data is sent as JSON over BLE, TCP or UART,
and can be shared with other clients when bridge mode is enabled.
The sensor type is detected automatically, showing appropriate UI elements.
Download IoT sensors
☂︎ App Store for iOS and macOS
☂︎ video demo
Thingy:91
☂︎ product page
☂︎ sensors firmware
JSON data
Sensor data samples use JSON format and are separated by a new line. Optional values may be ommited.
type={ "key" : value} // regular format key: value// simple format
Thingy:91 sensors
// LED0-5 status (individual) GPIO0: 0 GPIO5: 1 bool value// LED0-5 status // GPIO0:R GPIO1:G GPIO2:B RGB // GPIO3:r GPIO4:g GPIO5:b RGB sense // LED status (all LEDs) GPIO: 3f uint8_t value// LED status in hex 0-3f // 0x01:R 0x02:G 0x04:B RGB // 0x08:r 0x10:g 0x20:b RGB sense // adxl362 adxl362={ "x" : 3 . 1 , "y" : - 0 . 9 , "z" :- 10 . 8 , "t" : 21 . 6 } float x, y, z// accelerometer data m/s² float t// temperature °C (optional) // adxl372 adxl372={ "x" : 101 , "y" : 68 , "z" : 25 , "s" : 1007 } float x, y, z// accelerometer data m/s² uint16_t s// status flags in hex (optional) // BH1749 light and colour bh1749={ "r" : 69 , "g" : 1 , "b" : 0 , "i" : 4 } uint16_t r, g, b, i// light data RGB + infrared // b|battery b={ "v" : 3637 , "l" : 4 , "c" : 0 } battery={ "v" : 3637 , "l" : 4 , "c" : 0 } uint16_t v// voltage mV uint8_t l// state of charge % (optional) uint8_t c// charge status (optional) // b|battery voltage mV b: 3637 battery: 3637 uint16_t v// voltage mV // BME680 pressure and temperature bme680={ "temp" : 23 . 897 , "pressure" : 98429 , "humidity" : 33 . 200 , "gas" : 810247 } float temp// °C float pressure// Pa float humidity// % uint32_t gas// gas resistance:Ω
Generic sensors
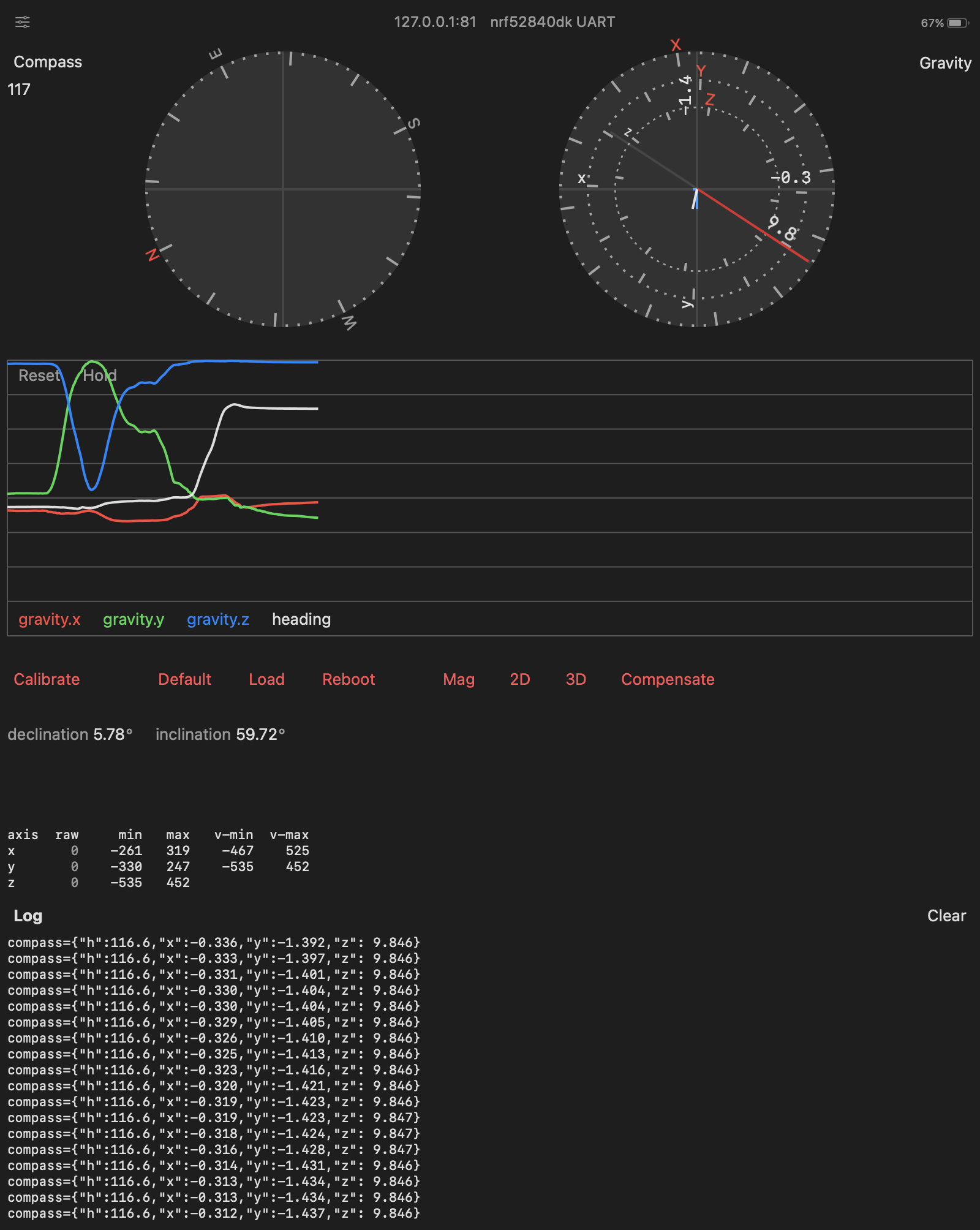
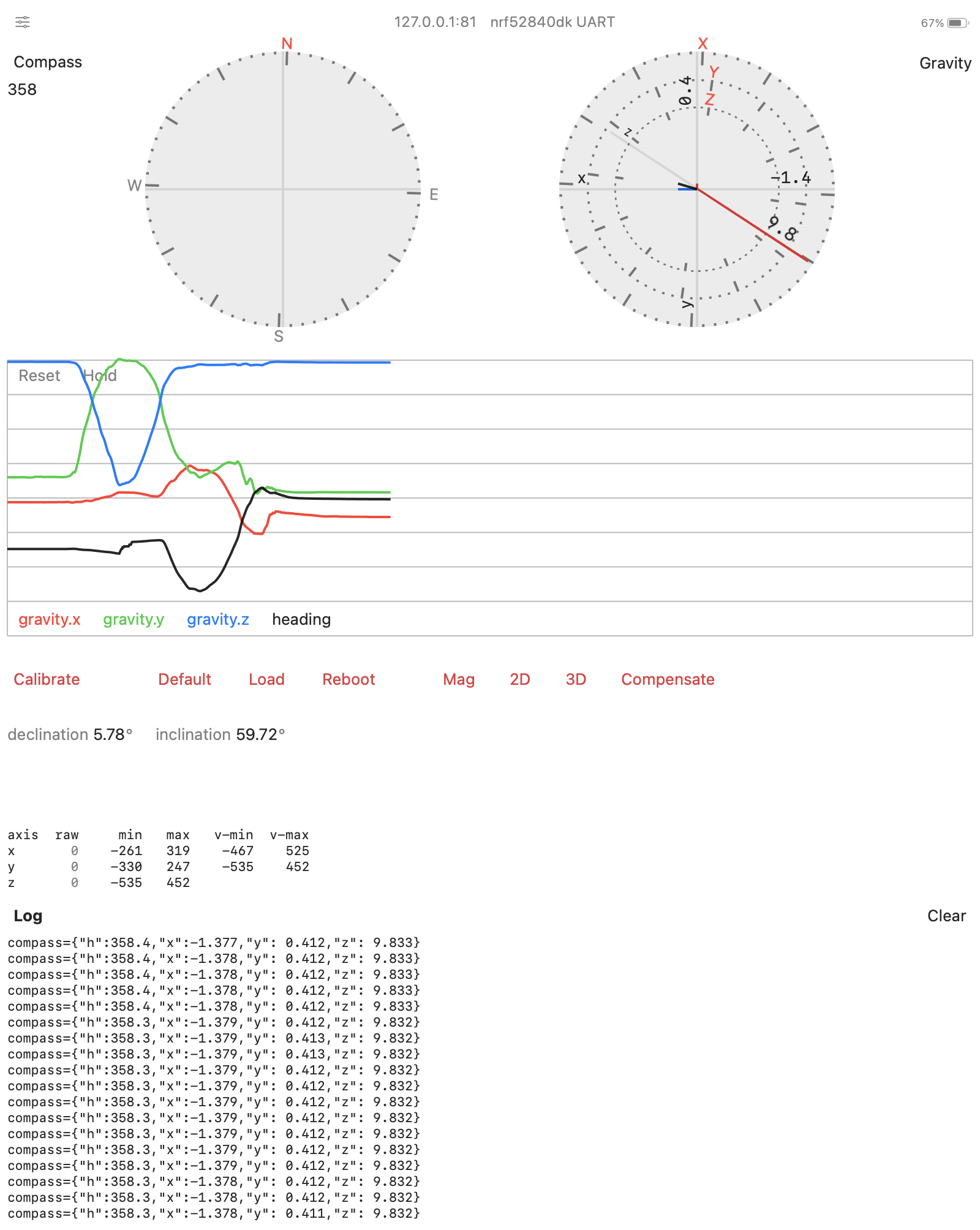
// g|gps g={ "h" : 170 } gps={ "h" : 170 } gps={ "h" : 171 , "b" : 0 , "B" : 7441 } float h// heading degree float b// bearing degree float B// battery voltage mV // c|compass c={ "h" : 171 , "x" :- 0 . 00 , "y" :- 0 . 00 , "z" : 10 . 0 } compass={ "h" : 170 . 9 , "x" :- 0 . 003 , "y" :- 0 . 002 , "z" : 10 . 000 } float h// heading degree float x, y, z// gravity data m/s² // gravity gravity={ "x" :- 0 . 00 , "y" :- 0 . 00 , "z" : 10 . 0 } float x, y, z// gravity data m/s² // gyro|gyroscope gyro={ "x" :- 0 . 00 , "y" :- 0 . 00 , "z" :- 0 . 00 } gyroscope={ "x" :- 0 . 00 , "y" :- 0 . 00 , "z" :- 0 . 00 } float x, y, z// angle in degree // compass calibration: cc|compass_c compass_c={ "heading" : 165 . 1 , "h" : 165 , "x" : 0 . 001 , "y" : - 0 . 000 , "z" : 10 . 000 , "x_raw" : - 233 , "y_raw" : 29 , "z_raw" : - 372 , "x_min" : - 261 , "y_min" : - 330 , "z_min" : - 535 , "x_max" : 319 , "y_max" : 247 , "z_max" : 452 , "xv_min" : - 467 , "yv_min" : - 535 , "xv_max" : 525 , "yv_max" : 452 , "zero" : 999 , "z_ang" : 0 , "c" : "xy" , "e" : "00" } float heading, h// heading (optional) float x, y, z// gravity data m/s² int16_t x_raw, y_raw, z_raw// magnetometer RAW data (optional) int16_t x_min, y_min, z_min// magnetometer MIN data int16_t x_max, y_max, z_max// magnetometer MAX data int16_t xv_min, yv_min// magnetometer MIN data, vertical int16_t xv_max, yv_max// magnetometer MAX data, vertical int16_t xv_max, yv_max// magnetometer MAX data, vertical int16_t z_ang// z angle (optional) int16_t zero// zero (optional) char c[] // calibration state enum: "" "xy" "xv" "yv" "z" (optional) char e[] // calibration event flags in hex (optional) // compass calibration short: cs|compass_s cs={ "h" : 165 , "z_ang" : - 0 , "e" : "00" } compass_s={ "heading" : 165 , "z_ang" : - 0 , "e" : "00" } float heading, h// heading (optional) int16_t z_ang// z angle (optional) int16_t zero// zero (optional) char c[] // calibration state enum: "xy" "xv" "yv" "z" (optional) char e[] // calibration event flags in hex (optional) // compass inclination and declination: ci|compass_i compass_i={ "dec" : 578 , "inc" : 5972 } int16_t dec// declination int16_t inc// inclination // battery configuration bat={ "low" : 3200 , "high" : 4050 , "pack" : 4500 } config_bat={ "low" : 3200 , "high" : 4050 , "pack" : 4500 } uint16_t low// mV for state of charge 0% uint16_t high// mV for state of charge 100% uint16_t pack// mV used to detect the number of batteries in a pack, e.g. // if v >= 1 * pack the pack contains 2 batteries in serries // if v >= 2 * pack the pack contains 3 batteries in serries
Other sensors
// IIS2DLPC accelerometer iis2dlpc={ "x" :- 0 . 00 , "y" :- 0 . 00 , "z" : 10 . 0 } float x, y, z// accelerometer data m/s² // NOA1305 ambient light sensor noa1305={ "als" : 10 } uint32_t als// ambient light // SHTC3 pressure and temperature shtc3={ "temp" : 23 . 897 , "humidity" : 33 . 200 } float temp// °C float humidity// % // ADP536X power controller adp536x={ "cs1" : "0x00" , "cs2" : "0x00" , "pgs" : "0x00" , "voltage" : 3637 , "level" : 4 } uint8_t cs1// status 1 uint8_t cs2// status 2 uint8_t pgs// charge status uint8_t level// state of charge % uint16_t voltage// voltage mV // RTC date time rtc={ "y" : 2024 , "m" : 1 , "d" : 6 , "hh" : 18 , "mm" : 38 , "ss" 48} uint16_t y// year uint8_t m// month uint8_t d// day uint8_t hh// hour uint8_t mm// minutes uint8_t ss// seconds
RAW sensors
// MPU6050 accelerometer + gyroscope mpu6050={ "ax" : 0 , "ay" : 0 , "az" : 0 , "gx" : 0 , "gy" : 0 , "gz" : 0 } float ax, ay, az// accelerometer data m/s² float gx, gy, gz// angle in degree // HMC5883 compass RAW, calibration performed in the APP hmc5883={ "x" : 0 , "y" : 0 , "z" : 0 } uint16_t x, y, z// magnetometer RAW data // HMC5883 compass normalised hmc5883n={ "x" : 0 , "y" : 0 , "z" : 0 } float x, y, z// magnetometer normalised data
LED control and other commands sent to the sensors
o[ 0- 5 ][ 01] LED off or on o[ 0- 5 ][ RT] LEDread or toggle oR LEDread all o[ WT][ 0- 3f ] LEDwrite or toggle all compass C calibrate D reset calibration default L load calibration 22D calibration mode 33D calibration mode c toggle compensate E toggle? help R CPU reset< dump registersfor all tasks< # dump registers for task # # comment: ignore this line
Offline testing
☂︎ Offline data can be served using netcat or
g_relay.
☂︎ g_relay forwards data between clients, e.g. netcat and IoT sensors.
☂︎ Run g_relay in a terminal, then connect netcat nc localhost 81.
☂︎ Run IoT sensors.
☂︎ Tap the connection settings button located in the top-left corner.
☂︎ Enter IP address and port of the server providing sensor data.
☂︎ Use the green Connect button to conntct to a TCP server.
☂︎ Paste sample data in the netcat terminal.
☂︎ For realistic animation, simulate a slow connection e.g. 115200 bps or slower.
Video demo IoT sensors for macOS
Video demo IoT sensors for iOS
Privacy policy
☂︎ Data not collected